I’ve had a lot of difficulty getting robust estimates from my random coefficient models. It is frequently the case that merely changing the random number generator seed leads to large changes in my parameter estimates. This reflects the fact that simulation error is often a significant contributor to one’s standard errors. While generally unappealing in academic research, it is disastrous in a professional setting where point estimates tend to play an outsized role. The goal of this post is to introduce some methods to ameliorate the impact of simulation error and help make estimates more precise.
Berry, Levinsohn, and Pakes (1995) decompose the variance of their random coefficient estimator into three parts: variance from the product characteristics, variance from consumer sampling, and variance from simulating market shares. While we generally cannot eliminate the variance from the first two sources, the researcher has control over the last. With enough computing power, the simulation error could be driven to zero by taking an increasing number of random draws. Unfortunately, most researchers don’t have access to a supercomputer and must settle for using a small number of draws (I generally see people use between 50 and 5,000). The hope is that even with few draws the simulation error will be negligible. However, this is rarely the case. In their 1995 paper, BLP estimated that simulation error increased their standard error by around 5-20% and even doubled the standard error of one parameter. They were already using a variance reduction technique, so the situation would be worse using the industry standard pseudo-Monte Carlo techniques. Part of the problem is that Monte Carlo methods are inefficient. Adding an an additional decimal place of precision requires increasing the number of draws by a factor of 100. In problems where market shares are on the order of 0.001 (as in BLP) one would need to use millions of draws in order to get accurate estimates. Several techniques have been proposed in the literature to remedy this issue.
The simplest variance reduction method is to replace the Monte Carlo draws with a low discrepancy sequence, such as Halton sequences (e.g. Brunner (2017)), Sobol sequences (e.g. Li, et. al. (2017)), or Modified Latin Hypercube Sampling (e.g. Hess et. al. (2006)). These sequences provide a better coverage of the region of integration and can often achieve a variance similar to Monte Carlo integration with a fraction of the draws. In a the same vein, Skrainka and Judd (2011) proposed using sparse grid integration and monomial rules to approximate the market share integrals. While highly effective for lower dimensional problems, I have found this method does not work as well when there are many competitors. The reason is that with many competitors, market shares tend to be small and small market shares are determined by the tails of the distribution, exactly where the approximation is poorest. The focus of this page is importance sampling. This was the method used in Berry, Levinsohn, Pakes (1995), as well some of the subsequent random coefficients literature, e.g. Petrin (2002) and Petrin, Seo (2016)). More recently, Brunner (2017) proposed using a Gaussian importance sampler, another case I will consider below. When done properly, importance sampling can lead to significantly increases in efficiency for fewer draws. Unfortunately, it is also more difficult to implement reliably.
These notes rely heavily on my code for the random coefficient estimator, provided here. For a discussion of the mechanics of the BLP estimator (including using quadrature and Halton draws to approximate market shares), see the notes I posted here.
A Simple Example of Importance Sampling
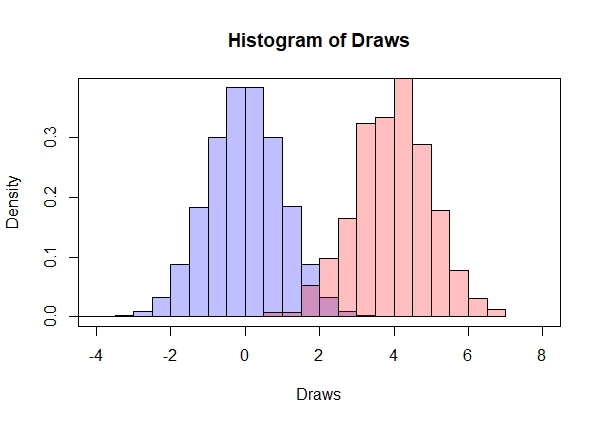
Monte Carlo methods are straightforward, both to program and understand. What they lack in efficiency, they make up for in robustness. With enough time and computational power any integral can be accurately simulated and so any random coefficients model can be solved. Of course, efficiency is almost always a concern, necessitating the use of other methods. My previous post focused on using low discrepancy sequences and quadrature to reduce simulation error. BLP instead use importance sampling. Importance sampling, being as much art as science, lacks the same concreteness as Monte Carlo methods, requiring more care on behalf of the researcher to ensure that the resulting estimator is robust while simultaneously reducing computational complexity. Importance sampling has the potential to provide accurate results using few draws, however, when poorly implemented, it can make an estimator’s once finite variance, infinite.
To illustrate, consider taking 






![E[h(y)]](https://s0.wp.com/latex.php?latex=E%5Bh%28y%29%5D&bg=ffffff&fg=73757D&s=0&c=20201002)
![\displaystyle E[h(y)] = \int h(y)f(y) dy = \int \frac{h(y)f(y)}{g(y)}g(y)dy \approx \frac{1}{n}\sum \frac{h(y_i)f(y_i)}{g(y_i)}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+E%5Bh%28y%29%5D+%3D+%5Cint+h%28y%29f%28y%29+dy+%3D+%5Cint+%5Cfrac%7Bh%28y%29f%28y%29%7D%7Bg%28y%29%7Dg%28y%29dy+%5Capprox+%5Cfrac%7B1%7D%7Bn%7D%5Csum+%5Cfrac%7Bh%28y_i%29f%28y_i%29%7D%7Bg%28y_i%29%7D+&bg=ffffff&fg=73757D&s=0&c=20201002)
Note that the draws 




I calculated the frequency estimator using 







The data generating process in BLP shares similarities with the above example. The market shares are small, with an average share of 

where 
Importance Sampling in BLP
The Monte Carlo approach entails drawing 


Consider the following transformation

where 

and note that integrating this function with respect to the pdf 



Here, we divide by 







Let 

Note that

The term inside the integral is equal to

Next, we need to calculate 



Conditioning and integrating, and noting that 

With these probabilities in hand, we can apply Bayes Rule.

By the last term is equal to
We don’t know 

There is one last thing to note. The optimal 




The theory is involved, but coding the importance sampler is actually quite simple. The first thing we need is an initial consistent estimate. I use the parameter values reported in BLP. Given our consistent estimate
βs = [-7.061, 2.883, 1.521, -0.122, 3.46] γs = [0.952, 0.477, 0.619, -0.415, -0.046, 0.019] α = 43.501 σs = [3.612, 4.628, 1.818, 1.050, 2.056]; srand(1234) ns = 5000*20 v_ik1 = randn(6, ns )' # Antithetic draws, for shits and giggles v_ik1 = reshape([v_ik1[:] -v_ik1[:]]', size(v_ik1,1)*2, size(v_ik1,2)) m_t = repeat(incomeMeans, inner = [ns*2, 1]) y_it1 = exp.(incomeMeans .+ sigma_v * v_ik1[:,end]'); unobs_weight = ones(ns*2)'/(ns*2)*20;
The first step, the call to gen_mm2, calculates the 





function impSample(m::ModelData, nsi::Int64, nf::Int64)
m_t = [2.01156, 2.06526, 2.07843, 2.05775, 2.02915, 2.05346, 2.06745,
2.09805, 2.10404, 2.07208, 2.06019, 2.06561, 2.07672, 2.10437, 2.12608, 2.16426,
2.18071, 2.18856, 2.21250, 2.18377]
sigma_v = 1.72
ns = nf * length(m_t)
xdraws = zeros(ns, size(m.X,2))
ydraws = zeros(ns)
weight = zeros(ns)
# Calculate Share
for ms in unique(m.marketidx)
clock = 0
idx1 = m.midx[ms,1]; idx2 = m.midx[ms,2]
X = m.X[idx1:idx2,:]
p = m.price[idx1:idx2]
draws = randn(size(X,2)+1, nsi)
randci = X * (draws[1:end-1,:] .* m.sigma)
y_it = exp.(m_t[ms] + sigma_v * draws[end,:])'
uijt = randci .- p./y_it * m.alpha .+ m.delta[idx1:idx2]
renorm = maximum(uijt, 1)
uijt .= exp.(uijt .- renorm)
share = uijt./(exp.(-renorm)+sum(uijt,1))
s_avg = mean(sum(share,1))
count = 1
while (nf >= count )*(10000 > clock)
clock += 1
tdraws = randn(size(X,2)+1, nf)
randci = X * (tdraws[1:end-1,:] .* m.sigma)
y_it = exp.(m_t[ms] + sigma_v * tdraws[end,:])'
uijt = randci .- p./y_it * m.alpha .+ m.delta[idx1:idx2]
renorm = maximum(uijt, 1)
uijt .= exp.(uijt .- renorm)
share = uijt./(exp.(-renorm)+sum(uijt,1))
share = sum(share,1)
udraws = rand(nf)
for i = 1:nf
if udraws[i] nf
break
end
end
end
end
weight = weight / ns * size(m.midx,1)
return xdraws, ydraws, weight
end
The importance draws should result in a lower variance in estimating market shares. The BLP estimator sets market shares to their observed values, so we are more interested in the variance of the implied
N = 20
dtest2 = zeros(length(m.delta), N)
for i = 1:N
m = ModelData( price[:], X, α, βs, γs, σs, deepcopy(delta_0), deepcopy(delta_0), markets[:], midx, J_f, y_it, v_ik[:,1:end-1],
unobs_weight'[:], zeros(size(X,1), size(v_ik,1)/20), convert(Array{Float64,1}, deepcopy(d_share)),
convert(Array{Float64,1}, deepcopy(d_share)), deepcopy(delta_0), zeros(size(X,1), 19));
m.y_it = 1.0./m.y_it[m.marketidx,:];
srand(i)
v_ik1, y_it1, unobs_weight1 = impSample(m, 8000, 750);
# Correct the y_it draws
incy = 1.0./exp.(incomeMeans .+ sigma_v * y_it1')[m.marketidx,:];
m2 = ModelData( price[:], X, α, βs, γs, σs, deepcopy(delta_0), deepcopy(delta_0), markets[:], midx, J_f, incy, v_ik1,
unobs_weight1, zeros(size(X,1), size(v_ik1,1)/20), convert(Array{Float64,1}, deepcopy(d_share)),
convert(Array{Float64,1}, deepcopy(d_share)), deepcopy(delta_0), zeros(size(X,1), 19));
gen_mm2(m2)
dtest2[:,i] = deepcopy(m2.delta)
end
mean((std(dtest2,2)))
0.2238364471487058
The standard Monte Carlo method, with the same number of draws, gave a mean standard deviation of 0.731. So we reduce the standard deviation of 
Gaussian Importance Sampling
The BLP importance sampler requires taking draws from a non-normal distribution using an accept-reject method that is not guaranteed to generate a sample in a reasonable amount of time. So that’s not great. An alternative approach, proposed by Brunner (2017) and based on the work of Heiss (2010), would be to find the normal distribution that best approximates 

where the term 






where 

where 

Defining

we can run a weighted regression of 





Using the estimates for 
With estimates of
There is one last subtlety that needs to be discussed before implementation. In both the BLP and adaptive EIS methods we need an initial estimate of 

function gen_mm3(m::ModelData, seed::Int64)
α = m.alpha
v_ik = m.v_ik
J_f = m.J_f
midx = m.midx
for i = 1:length(m.p_ijt)
m.p_ijt[i] = 0.0
end
# precalculate income effect
m.delta .= exp.(m.delta)
step = Int(size(m.v_ik,1)/20)
n = step
srand(seed)
ns = n * length(unique(m.marketidx))
xdraws = zeros(ns, size(m.X,2)); ydraws = zeros(ns); weight = zeros(ns)
n_ = size(m.X,2)+1
d = MvNormal(zeros(n_), eye(n_))
m_t = [2.01156, 2.06526, 2.07843, 2.05775, 2.02915, 2.05346, 2.06745, 2.09805, 2.10404, 2.07208, 2.06019, 2.06561, 2.07672, 2.10437, 2.12608, 2.16426, 2.18071, 2.18856, 2.21250, 2.18377]
sigma_v = 1.72
X_ = Array{Float64,2}(0,0)
lng = Array{Float64,2}(0,0)
t1 = collect(0:n - 1) / n;
# iterate over markets
for mi = 1:size(m.midx,1)
r1 = midx[mi,1]; r2 = midx[mi,2];
muidx1 = step*(mi - 1) + 1; muidx2 = step*mi
hs = rand(n_)/n
totd = zeros(n,n_)
for j = 1:n_
th = t1 + hs[j]
th = th[randperm(n)]
totd[:,j] = [norminvcdf( th[i] ) for i = 1:n]';
end
draws = totd'
d2 = sum(draws .* draws,1)/2.0;
v_ik = draws[1:end-1, :]'
y_it = exp.(m_t[mi] + sigma_v * draws[end,:])'
X = m.X[r1:r2,:]
δhat = m.delta[r1:r2]
pt = m.price[r1:r2]
mui = X*(v_ik.*m.sigma')' .- m.alpha*pt./y_it
mui = exp.(mui)
eps = 1.0; count = 1
numer = zeros(mui)
# contraction mapping/fixed point
while (eps > 1e-14)*(200 > count)
if 6 > count
myin = δhat'mui
pijt = myin ./ (1.0 + myin)
lng = log.(pijt)
y_ = (lng .- d2)[:]
is0 = find(y_ .!= -Inf)
X_1 = zeros(n , Int(n_*(n_+1)/2))
idx = 1
for i = 1:n_
for j = i:n_
X_1[:,idx] .= draws'[:,i].*draws'[:,j]
idx += 1
end
end
X_ = hcat(ones(n), draws', X_1)
X_ = X_[is0,:]
y_ = y_[is0]
gw = pijt[is0]'
Δs = ((X_.*gw)'X_)\(X_.*gw)'y_
γs_ = Δs[2:n_+1]
tmp = zeros(n_,n_)
idx = 1
for i = 1:n_
for j = i:n_
tmp[i,j] = Δs[n_+2:end][idx]
if i == j
tmp[i,j].*=2
end
idx+=1
end
end
B = inv(Symmetric( -tmp ))
L = chol(Hermitian(B))';
a = B*γs_;
vs = draws
somed = L*vs .+ a
m.v_ik[muidx1:muidx2,:] .= somed[1:end-1,:]'
m.y_it[mi, muidx1:muidx2] .= 1./exp.(m_t[mi] + sigma_v*somed[end,:])
m.unobs_weight[muidx1:muidx2] .= pdf(d, somed) ./ pdf(d, vs) * det(L) / n#.* unobs_weight
mui2 = X*(m.v_ik[muidx1:muidx2,:] .*m.sigma')' .- m.alpha*pt.*m.y_it[mi, muidx1:muidx2]'
mui2 = exp.(mui2)
end
numer .= mui2.*δhat;
s0 = 1.0./(1.0 + sum(numer,1))
m.p_ijt[r1:r2,:] .= numer .* s0;
m.s_jt[r1:r2] .= m.p_ijt[r1:r2,:] * m.unobs_weight[muidx1:muidx2]
# Finding the Fixed Point
if eps > 0.1
# Nevo Contraction
m.delta[r1:r2] .= m.delta[r1:r2] .* m.act_s[r1:r2]./m.s_jt[r1:r2]
eps = maximum(abs.((m.s_jt[r1:r2]./m.act_s[r1:r2]) - 1))
else
# Newton Root-finding
m.delta[r1:r2] .= log.(m.delta[r1:r2])
tmp2 = m.p_ijt[r1:r2,:] .* m.unobs_weight[muidx1:muidx2]'
Jf = Base.LinAlg.I - (tmp2*m.p_ijt[r1:r2,:]')./m.s_jt[r1:r2,:]
diff = log.(m.s_jt[r1:r2]) .- log.(m.act_s[r1:r2])
stp = -Jf\diff
m.delta[r1:r2] .= m.delta[r1:r2] .+ stp
eps = maximum(abs.(stp))
m.delta[r1:r2] .= exp.(m.delta[r1:r2])
end
δhat = m.delta[r1:r2]
count += 1
end
end
m.delta .= log.(m.delta)
# calculate mc
for j = 1:size(J_f, 1)
idx1 = J_f[j,1]; idx2 = J_f[j,2];
muidx = searchsortedlast(m.midx[:,1], idx1 )
muidx_1 = (muidx-1)*step + 1
muidx_2 = (muidx)*step
rp = m.p_ijt[idx1:idx2,:]
wα = m.unobs_weight[muidx_1:muidx_2] .* m.y_it[muidx,muidx_1:muidx_2] * α
nfirms = idx2 - idx1 + 1;
tmp2 = rp .* wα'
tmpvec = diagm(rp * wα);
gemm!('N', 'T', -1.0, m.p_ijt[idx1:idx2,:], tmp2 , 1.0, tmpvec)
b = tmpvec\m.s_jt[idx1:idx2]
m.mc[idx1:idx2] .= m.price[idx1:idx2] .- b
end
for i = 1:length(m.mc)
m.mc[i] = ifelse(0 > m.mc[i], 0.001, m.mc[i])
end
return nothing
end
Using the above code, I performed the same test as before and calculated the mean standard deviation of the
0.17706002102174695
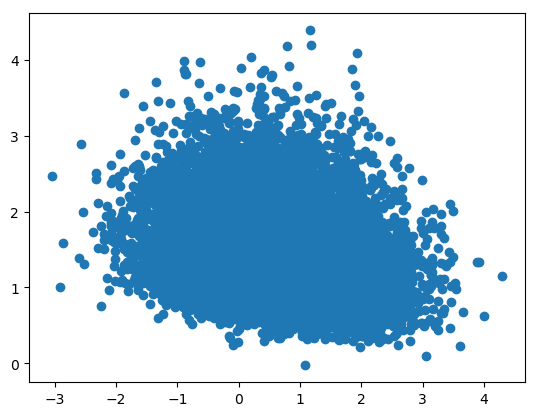
So adaptive EIS performed better than the baseline Monte Carlo and BLP’s importance sampler. To get a sense of how the two importance samplers work, I plotted a subset of the optimal draws for each method. The BLP draws are essentially bounded from below, reflecting the fact that it excludes draws that lead to a zero probability of purchasing one of the products. Adaptive EIS results in similar coverage, but includes those zero probability draws. In this sense, adaptive EIS is less efficient. However, by allowing the parameters

Performance
I have shown that each method resulted in a lower variance for estimated
std(tmpxMC2, 1) = [12.2137 2.34301 3.71322 1.38401 0.377048 1.54341]
mean(tmpxMC2, 1) = [42.0602 4.59074 4.01737 1.83184 0.421121 2.49259]
1×6 Array{Float64,2}:
0.290385 0.510377 0.924291 0.755526 0.895344 0.619197
The results I got for the BLP importance sampler are not a significant improvement. The relative standard deviation do decrease uniformly for each parameter, however, the mean price coefficient is much larger than the BLP estimate. This is because the price coefficient is sensitive to outliers and BLP’s importance sampler is more likely to result in outliers. As the number of draws is increased, this problem goes away.
std(tmpx, 1) = [11.2117 2.3445 3.49407 0.988789 0.319127 1.41423]
mean(tmpx, 1) = [56.7875 4.13899 4.16129 1.86884 0.392125 2.62202]
1×6 Array{Float64,2}:
0.197432 0.566444 0.83966 0.529093 0.813839 0.539366
The situation is improved with adaptive EIS. First note that the mean price parameter estimate is much closer to what BLP reported. Second, note that the relative standard deviation has decreased for most parameters and is substantially lower for the price coefficient
std(tmpx, 1) = [4.8542 1.14702 1.74645 1.05404 0.248643 0.724849]
mean(tmpx, 1) = [44.853 4.92704 4.07281 2.15881 0.293268 2.54106]
1×6 Array{Float64,2}:
0.108225 0.2328 0.428806 0.48825 0.847836 0.285254
As with all estimation routines, there is a trade-off between speed and accuracy. Adaptive EIS is very accurate but takes considerably longer to estimate. This is because the optimal draws are updated multiple times in each step, as opposed to once at the beginning. For many problems, such as random coefficient models without income effects, the BLP importance sampler will work well and be much faster. As always, it is up to the researcher to try each and see what works best in the context of their question.
References
- Berry, Steven, James Levinsohn, and Ariel Pakes. “Automobile prices in market equilibrium.” Econometrica: Journal of the Econometric Society (1995): 841-890.
- Brunner, Daniel, “Numerical Integration in Random Coefficient Models of Demand” PhD diss., Universität Düsseldorf, 2017
- Heiss, Florian. “The panel probit model: Adaptive integration on sparse grids.” Maximum simulated likelihood methods and applications. Emerald Group Publishing Limited, 2010. 41-64.
- Hess, Stephane, Kenneth E. Train, and John W. Polak. “On the use of a modified latin hypercube sampling (MLHS) method in the estimation of a mixed logit model for vehicle choice.” Transportation Research Part B: Methodological 40.2 (2006): 147-163.
- Li, Yang. An empirical study of national vs. local pricing under multimarket competition. Columbia University, 2012.
- Petrin, Amil. “Quantifying the benefits of new products: The case of the minivan.” Journal of political Economy 110.4 (2002): 705-729.
- Petrin, A., and B. Seo. “Identification and estimation of discrete choice models when observed and unobserved product characteristics are correlated.” (2016).
- Skrainka, Benjamin S., and Kenneth L. Judd. “High performance quadrature rules: How numerical integration affects a popular model of product differentiation.” (2011).
